11.13 Séries temporais não lineares
O enfoque será nos métodos apresentados na biblioteca tsDyn (Stigler 2019), (Fabio Di Narzo et al. 2024) que implementa modelos de séries temporais autorregressivas (AR) não lineares. Para uma introdução, veja a vinheta de tsDyn. Será utilizada a série temporal datasets::lynx de números anuais de capturas de linces entre 1821 e 1934 no Canadá.
11.13.1 Análise exploratória
11.13.1.1 Relações bivariadas e trivariadas
A função tsDyn::autopairs() mostra um gráfico de dispersão da série temporal \(x_t\) versus \(x_{t−lag}\).
par(mfrow=c(2,2))
autopairs(x, type = 'regression')
autopairs(x, lag = 2, type = 'regression')
autopairs(x, lag = 3, type = 'regression')
autopairs(x, lag = 4, type = 'regression')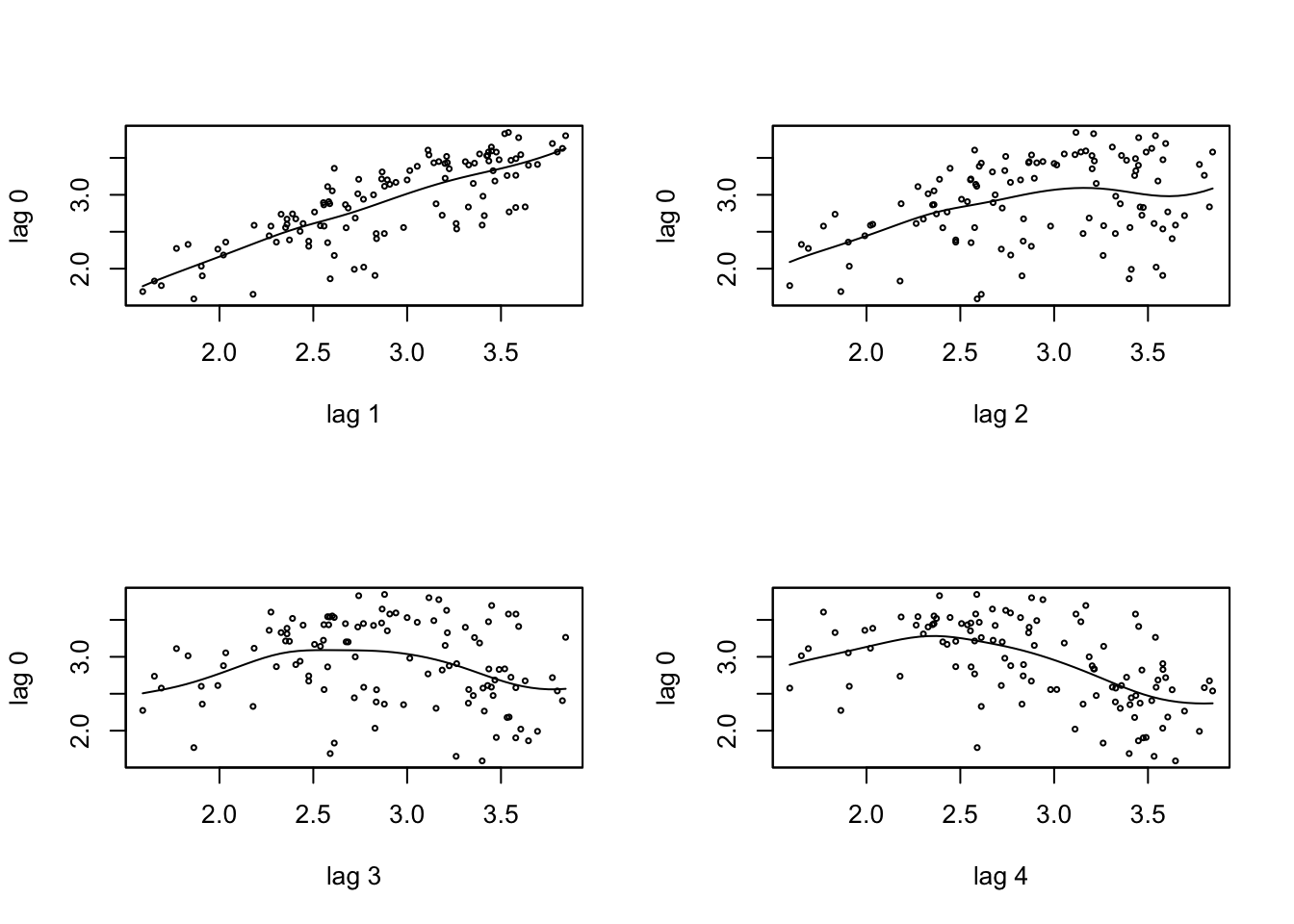
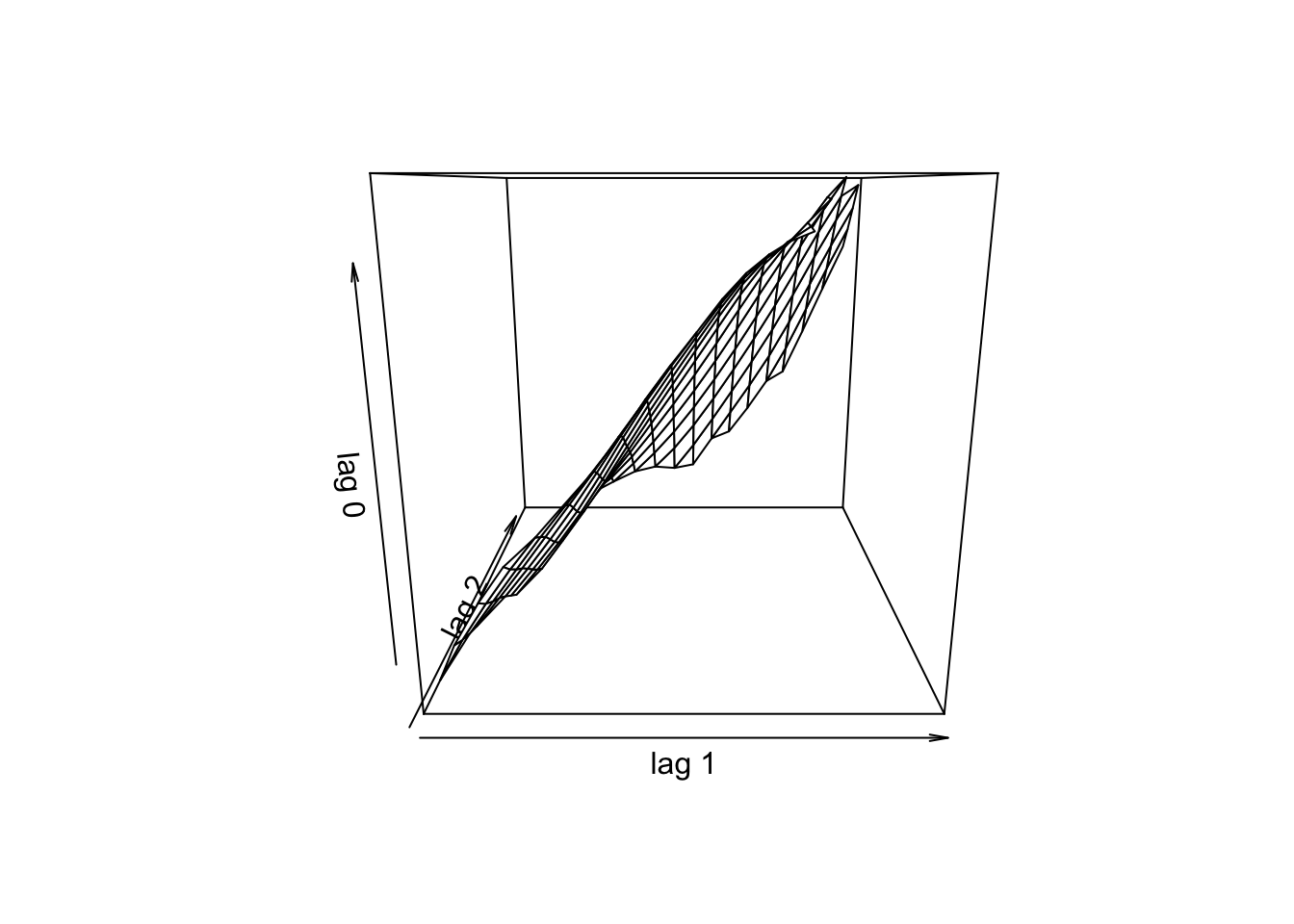
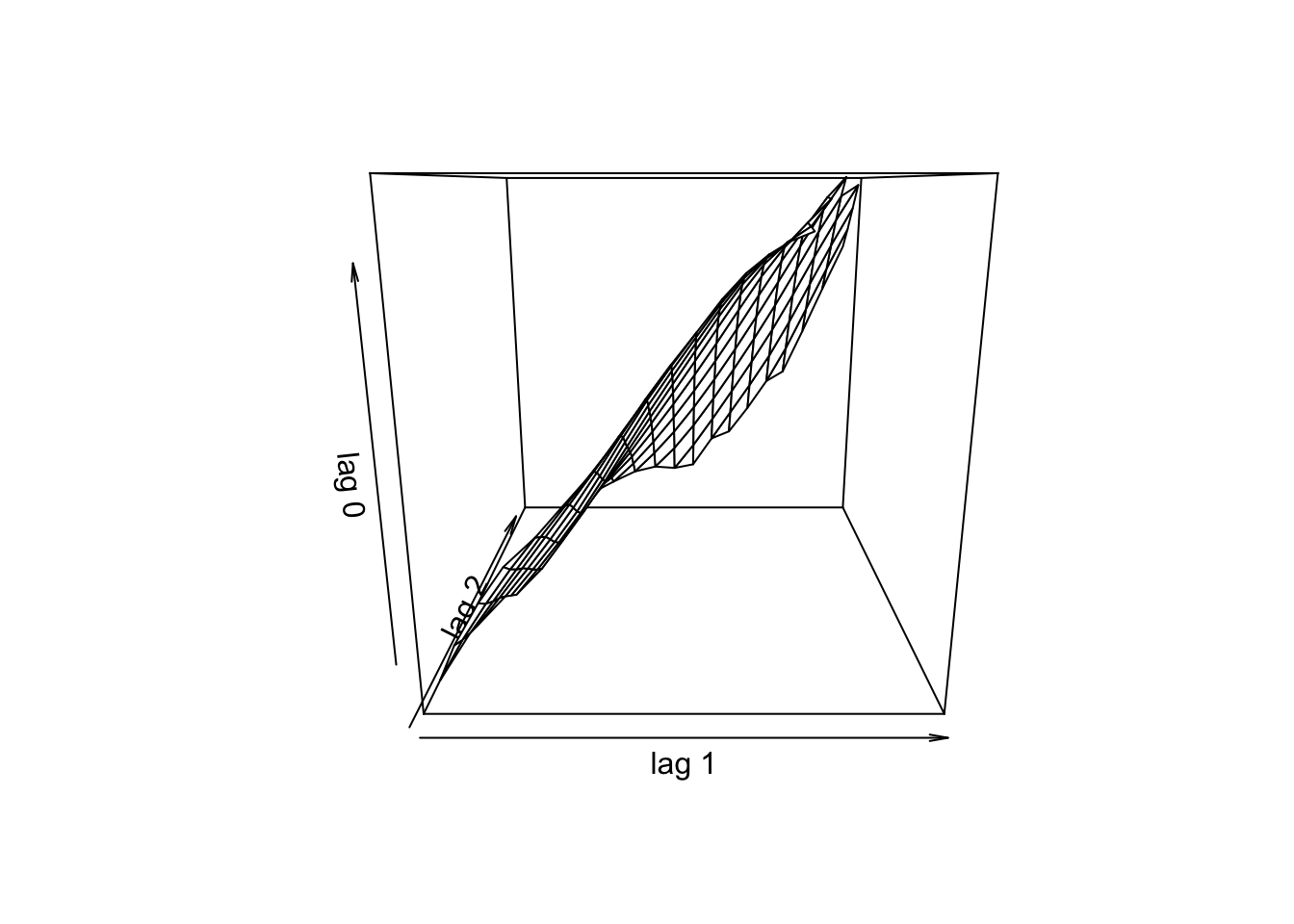
A função tsDyn::autotriples() apresenta \(x_t\) versus \((x_{t−lag1},x_{t−lag2})\).

11.13.1.2 Linearidade
A função tsDyn::llar() (locally linear autoregressive fit) implementa o gráfico de ajuste autorregressivo linear local proposto por (Casdagli 1992). Este gráfico exibe o erro relativo feito pela previsão de valores de série temporal com modelos lineares de dimensão \(m\) e atraso de tempo \(d\) na forma
\[\begin{equation} y_{t+s} = \phi_0 + \phi_1 y_t + \ldots + \phi_m y_{t-(m-1)d} \tag{11.44} \end{equation}\]
estimado em pontos na esfera de raio \(\varepsilon\) ao redor de \(y_t^m\) para um intervalo de valores de \(\varepsilon\). Um mínimo atingido em valores relativamente pequenos de \(\varepsilon\) pode indicar que um modelo linear global seria inapropriado para a aproximação da dinâmica da série temporal.
\(d\) - Atraso de Tempo (Time Delay)
- O que é: O intervalo de tempo (em número de passos de tempo) entre as cópias defasadas sucessivas da sua série temporal.
- O que faz: \(d\) determina o quão independentes as cópias defasadas são umas das outras.
\(m\) - Dimensão de Incorporação (Embedding Dimension)
- O que é: O número de dimensões do seu espaço de estados reconstruído. Em outras palavras, quantas cópias defasadas da sua série temporal você usará.
- O que faz: \(m\) determina quantos “eixos” seu grafo de reconstrução terá. Sua principal função é ser grande o suficiente para desdobrar o atrator sem autointerseções. Um atrator é um conjunto para o qual um sistema dinâmico evolui após um período suficiente de tempo.
Exemplo 11.58 Exemplo do que são \(m\) e \(d\).
# Série temporal
x <- c(5, 8, 12, 9, 6, 10, 15, 11, 7, 13)
# Incorporação manual com m=3, d=2
m <- 3
d <- 2
# Matriz de incorporação
embedded_matrix <- matrix(NA, nrow = length(x) - (m-1)*d, ncol = m)
for(i in 1:nrow(embedded_matrix)) {
embedded_matrix[i, ] <- x[seq(i, i + (m-1)*d, by = d)]
}
# Série temporal
x## [1] 5 8 12 9 6 10 15 11 7 13## [,1] [,2] [,3]
## [1,] 5 12 6
## [2,] 8 9 10
## [3,] 12 6 15
## [4,] 9 10 11
## [5,] 6 15 7
## [6,] 10 11 13Informação Mútua (Mutual Information)
Mutual information (…) measures the general dependence of two variables; therefore, it provides a better criterion for the choice of \(T\) than the autocorrelation function, which only measures linear dependence. (Fraser and Swinney 1986, 1135)
- É uma medida de quanto informação uma variável contém sobre outra
- Se duas variáveis são independentes, a informação mútua é zero
- Se estão perfeitamente correlacionadas, a informação mútua é alta
Primeiro Mínimo
- O primeiro mínimo da informação mútua representa o ponto ideal onde
- Redundância mínima: \(y_t\) e \(y_{t+\tau}\) não são mais cópias quase idênticas
- Dinâmica preservada: Ainda mantêm relação dinâmica significativa
- Independência suficiente: As coordenadas são suficientemente independentes para revelar a estrutura multidimensional
Mutual Information (AMI)
- AMI Alta: \(y_t\) e \(y_{t+1}\) são “gêmeos idênticos”
- AMI Decai: \(y_t\) e \(y_{t+2}\) são “irmãos”
- PRIMEIRO MÍNIMO: \(y_t\) e \(y_{t+d}\) são “primos distantes mas ainda da mesma família”
- AMI Sobe: \(y_t\) e \(y_{t+d+1}\)podem ter relação periódica
- AMI Oscila: Padrões periódicos aparecem e desaparecem
Exemplo 11.59 Encontrando \(d\) e \(m\) ótimos.
# libs
library(tseriesChaos)
library(tsDyn)
# dados
data(lynx)
# Passo 1: Encontra d usando informações mútuas
mi_result <- mutual(lynx, lag.max = 20)
mi_vals <- as.numeric(mi_result)
# Detecção simples do primeiro mínimo nos primeiros 10 lags
best_d <- which.min(mi_vals[1:10])
abline(v = best_d, col = 'red', lty = 2)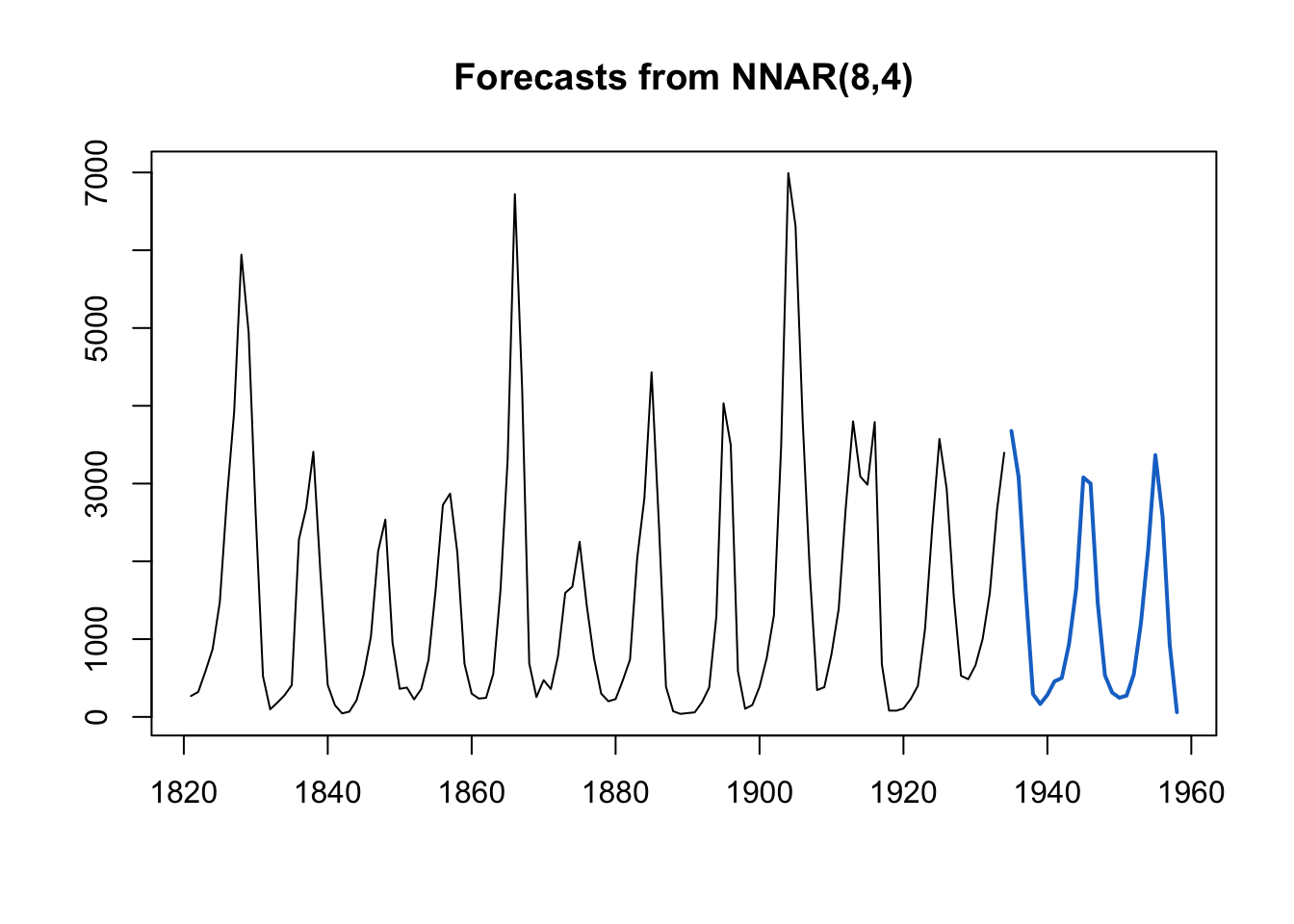
# Passo 2: testar o desempenho da previsão com diferentes valores de m
best_rmse <- Inf
best_m <- 2
# Usa os últimos 10 pontos para testar a previsão
test_size <- 10
train_data <- lynx[1:(length(lynx)-test_size)]
for(i in 2:6) {
tryCatch({
# Ajuste do modelo SETAR (não linear)
model <- setar(train_data, m = i, d = best_d)
# Prever os próximos valores
predictions <- predict(model, n.ahead = test_size)
# Calcular RMSE no conjunto de teste
actual <- lynx[(length(lynx)-test_size+1):length(lynx)]
rmse <- sqrt(mean((predictions - actual)^2, na.rm = TRUE))
cat("m =", i, "RMSE =", rmse, "\n")
if(rmse < best_rmse) {
best_rmse <- rmse
best_m <- i
}
}, error = function(e) {
cat("Modelo falhou para m =", i, "\n")
})
}## m = 2 RMSE = 1359.775## m = 3 RMSE = 2066.418## m = 4 RMSE = 2302.059## m = 5 RMSE = 2337.257## m = 6 RMSE = 3510.999## Parâmetros recomendados: m = 2 , d = 7O método para estimar \(m\) e \(d\) é chamado time-delay embedding, e está baseado no Teorema de Takens (Takens 2002). Takens demonstra ser possível reconstruir um sistema complexo de espaços de estados usando cópias com defasagem de tempo de uma única variável observada. Para mais detalhes veja (Fraser and Swinney 1986) e (Hegger et al. 1999).
11.13.1.3 Teste BDS (Brock-Dechert-Scheinkman)
It is well known that processes which are linearly independent, i.e. with zero autocorrelations at all lags, can exhibit higher order dependence or nonlinear dependence. (Manzan 2003, 17)
O teste de não linearidade BDS foi desenvolvido por William Brock, W. Davis Dechert e José Alexandre Scheinkman em 1987, publicado posteriormente por (Brock et al. 1996). A proposta é calcular a estatística de teste BDS sob a hipótese nula de que a série temporal testada é uma sequência de variáveis aleatórias iid.
O teste está implementado na função fNonlinear::bdsTest() (Wuertz et al. 2024).
The
bdsTesttest examines the spatial dependence of the observed series. To do this, the series is embedded in \(m\)-space and the dependence of \(x\) is examined by counting near points. Points for which the distance is less thanepsare called near. The BDS test statistic is asymptotically standard Normal. Note, that missing values are not allowed. ~ Documentação defNonlinear::bdsTest()
Exemplo 11.60 Adapatado de (Tsay and Chen 2019, 20–24) e da documentação de fNonlinear::bdsTest().
##
## Title:
## BDS Test
##
## Test Results:
## PARAMETER:
## Max Embedding Dimension: 3
## eps[1]: 0.45
## eps[2]: 0.9
## eps[3]: 1.35
## eps[4]: 1.8
## STATISTIC:
## eps[1] m=2: -1.1487
## eps[1] m=3: -3.1486
## eps[2] m=2: -2.1158
## eps[2] m=3: -2.3245
## eps[3] m=2: -2.2512
## eps[3] m=3: -2.4027
## eps[4] m=2: -2.1239
## eps[4] m=3: -2.1362
## P VALUE:
## eps[1] m=2: 0.2507
## eps[1] m=3: 0.001641
## eps[2] m=2: 0.03436
## eps[2] m=3: 0.0201
## eps[3] m=2: 0.02437
## eps[3] m=3: 0.01627
## eps[4] m=2: 0.03368
## eps[4] m=3: 0.03266
##
## Description:
## Sun Jun 14 22:12:27 2026 by user:##
## Title:
## BDS Test
##
## Test Results:
## PARAMETER:
## Max Embedding Dimension: 3
## eps[1]: 0.279
## eps[2]: 0.558
## eps[3]: 0.838
## eps[4]: 1.117
## STATISTIC:
## eps[1] m=2: 51.4822
## eps[1] m=3: 82.9787
## eps[2] m=2: 32.0318
## eps[2] m=3: 38.6321
## eps[3] m=2: 20.7438
## eps[3] m=3: 19.3338
## eps[4] m=2: 16.4341
## eps[4] m=3: 14.3115
## P VALUE:
## eps[1] m=2: < 2.2e-16
## eps[1] m=3: < 2.2e-16
## eps[2] m=2: < 2.2e-16
## eps[2] m=3: < 2.2e-16
## eps[3] m=2: < 2.2e-16
## eps[3] m=3: < 2.2e-16
## eps[4] m=2: < 2.2e-16
## eps[4] m=3: < 2.2e-16
##
## Description:
## Sun Jun 14 22:12:27 2026 by user:O teste BDS também está implementado na função tseries::bds.test() (Trapletti and Hornik 2024).
##
## BDS Test
##
## data: rnorm(length(lynx))
##
## Embedding dimension = 2 3
##
## Epsilon for close points = 0.45 0.90 1.35 1.80
##
## Standard Normal =
## [ 0.45 ] [ 0.9 ] [ 1.35 ] [ 1.8 ]
## [ 2 ] -1.1487 -2.1158 -2.2512 -2.1239
## [ 3 ] -3.1486 -2.3245 -2.4027 -2.1362
##
## p-value =
## [ 0.45 ] [ 0.9 ] [ 1.35 ] [ 1.8 ]
## [ 2 ] 0.2507 0.0344 0.0244 0.0337
## [ 3 ] 0.0016 0.0201 0.0163 0.0327##
## BDS Test
##
## data: log10(lynx)
##
## Embedding dimension = 2 3
##
## Epsilon for close points = 0.2792 0.5584 0.8376 1.1168
##
## Standard Normal =
## [ 0.2792 ] [ 0.5584 ] [ 0.8376 ] [ 1.1168 ]
## [ 2 ] 51.4822 32.0318 20.7438 16.4341
## [ 3 ] 82.9787 38.6321 19.3338 14.3115
##
## p-value =
## [ 0.2792 ] [ 0.5584 ] [ 0.8376 ] [ 1.1168 ]
## [ 2 ] 0 0 0 0
## [ 3 ] 0 0 0 011.13.2 Modelo autorregressivo não linear
Seja o processo estocástico a tempo discreto \(Y_t\) gerado pelo mapeamento \[\begin{equation} Y_{t+s} = f(Y_t,Y_{t-d},\ldots,Y_{t-(m-1)d}|\theta) + a_{t+s} \tag{11.45} \end{equation}\] onde \(a_t \sim WN(0,\sigma_a)\), \(a_{t+s} \perp\!\!\!\perp Y_{t+s}\) e \(f\) é uma função genérica de \(\mathcal{R}^m\) em \(\mathcal{R}\). Esta classe de modelos é frequentemente referenciada na literatura com a sigla NLAR\((m)\), que significa Não Linear AutoRegressivo de ordem \(m\).
A dimensão de incorporação \(m\) em séries temporais é o comprimento do vetor usado para reconstruir o espaço de estados (ou espaço de fase) sucessivo de um processo, que mostra as características dinâmicas de uma série temporal. Conforme (Tsay and Chen 2019, 22), considerando \(m\) um inteiro positivo define-se uma \(m\)-história (\(m\)-history) de uma série temporal como \[\begin{equation} \boldsymbol{y}_t^m = (y_t, y_{t−1}, \ldots, y_{t−m+1}) \text{ para } t = m, \ldots, T. \tag{11.45} \end{equation}\]
A função tsDyn::availableModels() retorna a lista de modelos de séries temporais da classe nlar disponíveis.
## [1] "linear" "nnetTs" "setar" "lstar" "star" "aar" "lineVar" "VECM" "TVAR" "TVECM"| Modelo | Equação |
|---|---|
linear |
\[Y_{t+s} = \phi + \phi_0 Y_t + \phi_1 Y_{t-d} + \ldots + \phi_m Y_{t-(m-1)d} + a_{t+s}\] |
nnetTs |
\[Y_{t+s} = \beta_0 + \sum_{j=1}^{D} \beta_j g(\gamma_{0j} + \sum_{i=1}^{m} \gamma_{ij} Y_{t-(i-1)d})\] |
setar |
\[Y_{t+s} = \left\{ \begin{array}{l l} \phi_1 + \phi_{10}Y_t + \phi_{11}Y_{t-d} + \ldots + \phi_{1L}Y_{t-(L-1)d} + a_{t+s}, & \quad Z_t \le th\\ \phi_2 + \phi_{20}Y_t + \phi_{21}Y_{t-d} + \ldots + \phi_{2H}Y_{t-(H-1)d} + a_{t+s}, & \quad Z_t < th\\ \end{array} \right.\] |
lstar |
\[Y_{t+s} = (\phi_1 + \phi_{10}Y_t + \phi_{11}Y_{t-d} + \ldots + \phi_{1L}Y_{t-(L-1)d})(1-G(Z_t,\gamma,th)) + (\phi_2 + \phi_{20}Y_t + \phi_{21}Y_{t-d} + \ldots + \phi_{2H}Y_{t-(H-1)d})G(Z_t,\gamma,th) + a_{t+s}\] |
star |
|
aar |
\[Y_{t+s} = \mu + \sum_{i=1}^{m} s_i(Y_{t-(i-1)d})\] |
lineVar |
|
VECM |
|
TVAR |
|
TVECM |
- \(m\): dimensão de incorporação (embedding dimension), AR\((p-1)\)?
- \(d\): atraso de tempo (time delay), equivale à diferença sazonal \(D\)?
- \(s\): passos de previsão (forecasting steps)
- \(Z_t\): variável limite (threshold variable)
- \(th\): limite (threshold)
- \(D\): unidades ocultas (hidden units)
- \(g\): função de ativação (activation function)
- \(G\): função logística (logistic function)
- \(\delta\): limite de atraso (threshold delay)
11.13.3 Rede neural autorregressiva
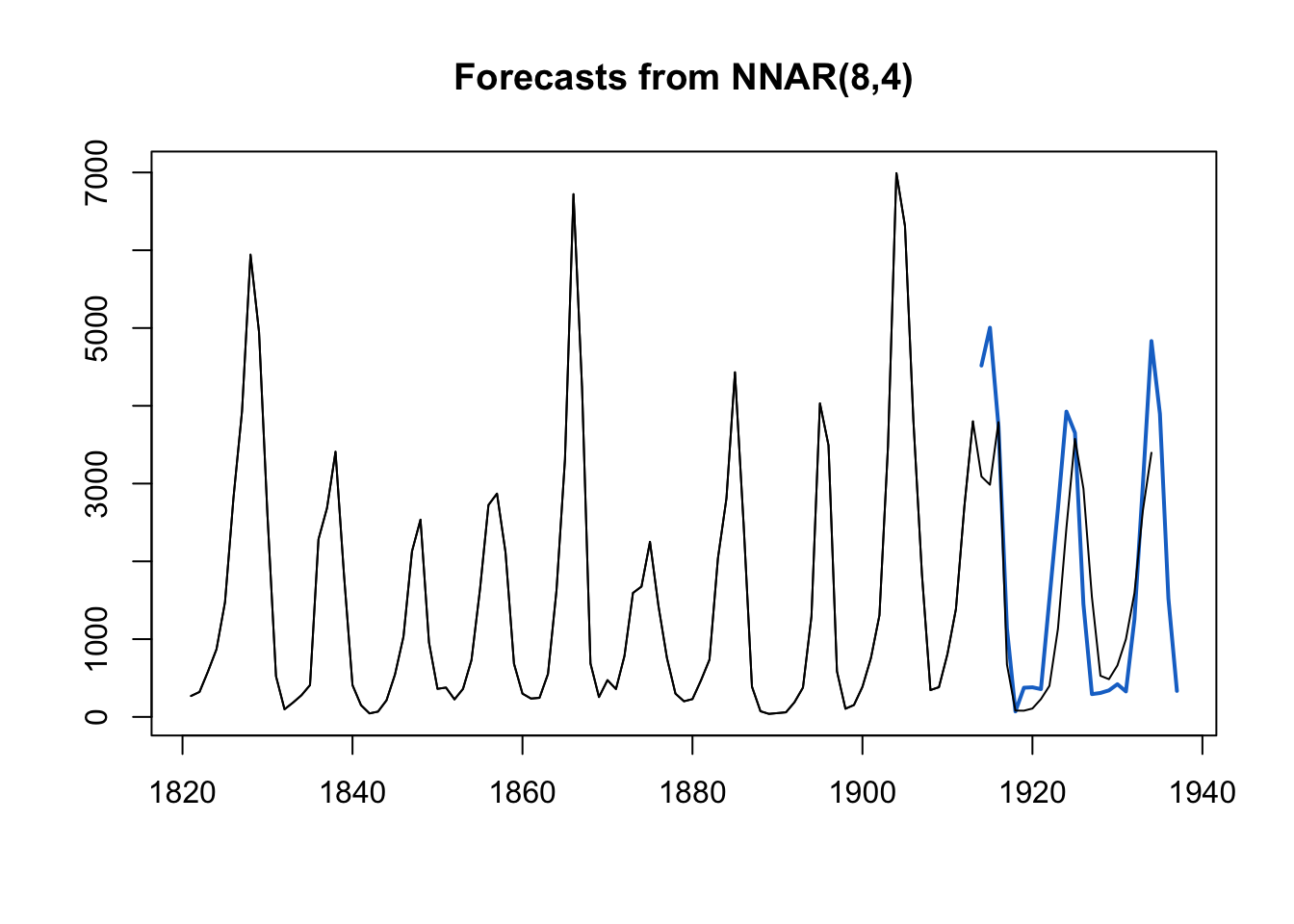
De acordo com (Hyndman and Athanasopoulos 2021), a função forecast::nnetar() ajusta um modelo NNAR\((p,P,k)_m\), que é análogo a um modelo ARIMA\((p,0,0)(P,0,0)_m\) com funções não lineares, onde \(k\) é o número de nós ocultos. Segundo a documentação, o argumento xreg permite a entrada de covariáveis, omitindo-se as linhas correspondentes a y e xreg se houver valores ausentes. A rede é treinada para previsão de uma etapa, e previsões de várias etapas são calculadas recursivamente.
Se os valores de \(p\) e \(P\) não forem especificados, eles serão selecionados automaticamente. Para séries temporais não sazonais, o padrão é o número ótimo de defasagens de acordo com o AIC para um modelo AR\((p)\) linear. Para séries temporais sazonais, os valores padrão são \(P=1\) e \(p\) é escolhido do modelo linear ótimo ajustado aos dados ajustados sazonalmente. Se \(k\) não for especificado, ele será definido como \(k=(p+P+1)/2\) arredondado para o inteiro mais próximo.
Exemplos, sendo que os modelos de rede neural não possuem as restrições nos parâmetros para garantir a estacionariedade.
- NNAR\((p,0) \equiv\) ARIMA\((p,0,0)\)
- NNAR\((p,P,0)_m \equiv\) ARIMA\((p,0,0)(P,0,0)_m\)
Exemplo 11.61 Aplicação de forecast::nnetar() na série temporal datasets::lynx.

Pode-se usar a estratégia treino-teste e calcular métricas de desempenho de previsão.
library(forecast)
fit <- forecast::nnetar(window(lynx, end=1913))
plot(predict(fit, h=24))
lines(lynx)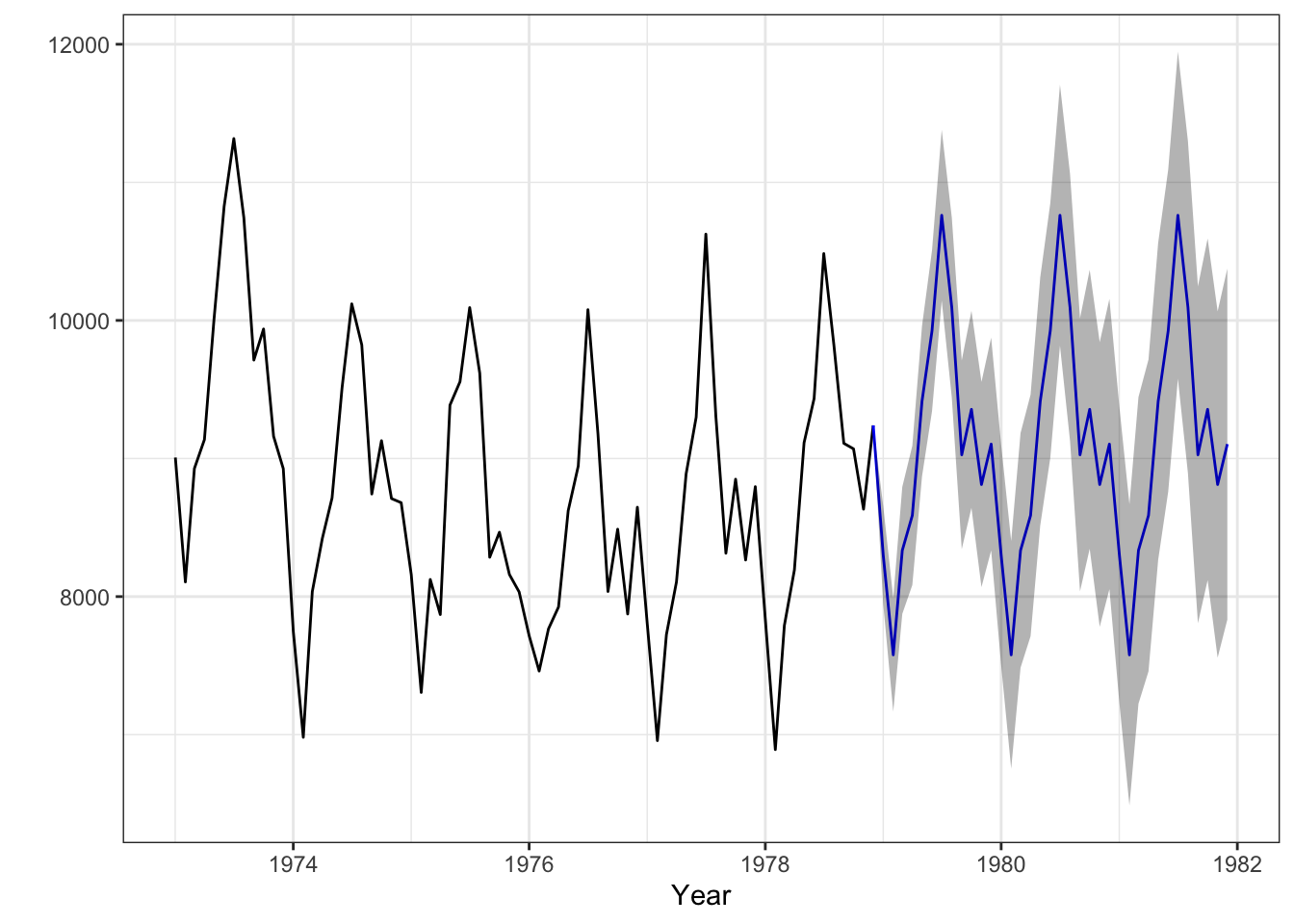
## ME RMSE MAE MPE MAPE MASE ACF1
## Training set 0.1280635 278.9293 186.8424 -32.64067 44.75747 0.2174152 -0.1422465Exercício 11.34
- Teste
plot(predict(fit, h = 48, PI = TRUE)). - Veja https://otexts.com/fpp3/nnetar.html
11.13.4 GLARMA
Os modelos GLARMA (Generalized Linear AutoRegressive Moving Average) estendem os modelos GLM para lidar com dados de contagem que possuem dependência temporal.
Estrutura do Modelo
1. Componente GLM:
- Variável resposta \(Y_t\) segue distribuição da família exponencial (Poisson, Binomial Negativa)
- Preditor linear: \(\eta_t = \mathbf{x}_t^T \beta\)
- Função de ligação: \(g(\mu_t) = \eta_t\) onde \(\mu_t = E(Y_t)\)
2. Componente ARMA:
- O preditor linear é expandido: \(\eta_t = \mathbf{x}_t^T \beta + e_t\)
- Onde \(e_t\) é o termo GLARMA modelado como:
\[\begin{equation} e_t = \sum_{i=1}^p \phi_i (e_{t-i} + Z_{t-i}) + \sum_{j=1}^q \theta_j Z_{t-j} \tag{11.46} \end{equation}\]
Equação Geral do GLARMA
\[\begin{equation} g(\mu_t) = \eta_t = \mathbf{x}_t^T \beta + e_t \tag{11.47} \end{equation}\]
Onde:
- \(\phi_i\): parâmetros AR (autorregressivos)
- \(\theta_j\): parâmetros MA (média móvel)
- \(Z_t\): resíduo condicional (ex: \(Z_t = Y_t - \mu_t\))
Vantagens
- Lida com dados de contagem não normais - Distribuições como Poisson e Binomial Negativa
- Captura dependência temporal - Modela autocorrelação em séries temporais de contagens
- Combina flexibilidade de GLMs e ARMA - Une o melhor dos dois mundos
- Interpretabilidade dos coeficientes - Mantém a interpretação dos modelos GLM
- Previsões mais precisas - Considera a estrutura temporal dos dados
- Aplicações versáteis - Epidemiologia, economia, ecologia, etc.
Comparação com Outros Modelos
| Modelo | Tipo de Dados | Dependência Temporal | Distribuição | Aplicação Principal |
|---|---|---|---|---|
| GLM | Contagens/Contínuos | Não considera | Poisson/Binomial/Normal | Dados independentes |
| ARMA | Contínuos normais | Considera | Normal | Séries temporais contínuas |
| GLARMA | Contagens não normais | Considera | Poisson/Binomial Negativa | Séries temporais de contagens |
| GARCH | Volatilidade | Considera | Normal/t-Student | Modelagem de volatilidade |
| INAR | Contagens inteiras | Considera | Poisson | Séries temporais inteiras |
Pacote glarma
(Dunsmuir and Scott 2015) apresentam o pacote glarma (Generalized Linear AutoRegressive Moving Average), que traz funções “para estimativa, teste, verificação de diagnóstico e previsão de modelos de média móvel autorregressiva linear generalizada (GLARMA) para séries temporais de valores discretos com variáveis de regressão”, sendo “uma classe de modelos de espaço de estado não lineares não gaussianos”.
Ainda segundo a documentação, “[o] vetor de estado consiste em um componente de regressão linear mais um componente orientado por observação que consiste em um filtro de média móvel autorregressiva (ARMA) de resíduos preditivos anteriores”.
Atualmente conta com as distribuições Poisson, binomial negativa e binomial para modelar a série da variável resposta, e “[t]rês opções (Pearson, tipo pontuação e não escalonada) para os resíduos no componente”. “Os testes de razão de verossimilhança e Wald para o componente orientado por observação permitem testar a dependência serial em configurações de modelo linear generalizado”, incluindo ainda “[d]iagnósticos gráficos, incluindo ajustes de modelo, funções de autocorrelação e resíduos de transformação integral de probabilidade”.
11.13.5 LSTM
O modelo LSTM (Long Short-Term Memory) é uma arquitetura baseada em Rede Neural Recorrente (RNN) utilizada para previsão de séries temporais. Será considera a abordagem da biblioteca TSLSTM (Paul and Yeasin 2022), que utiliza os módulos Keras e TensorFlow (Paul and Garai 2021).
Exemplo 11.62 Adaptado da documentação de TSLSTMplus::ts.lstm().
library(TSLSTMplus)
fit_lstm <- TSLSTMplus::ts.lstm(ts = lynx, tsLag = 2,
LSTMUnits = 5, Epochs = 2)## Model: "sequential_1"
## ____________________________________________________________________________________________________________
## Layer (type) Output Shape Param #
## ============================================================================================================
## lstm_1 (LSTM) (1, 5) 140
## dense_1 (Dense) (1, 1) 6
## ============================================================================================================
## Total params: 146 (584.00 Byte)
## Trainable params: 146 (584.00 Byte)
## Non-trainable params: 0 (0.00 Byte)
## ____________________________________________________________________________________________________________ # Optimizer = 'tf.keras.optimizers.legacy.RMSprop')
current_values <- stats::predict(fit_lstm, ts = lynx)
future_values <- predict(fit_lstm, horizon = 24, ts = lynx)Exercício 11.35 Veja
?TSLSTMplus::ts.lstm.- https://stackoverflow.com/questions/77222463/is-there-a-way-to-change-adam-to-legacy-when-using-mac-m1-m2-in-tensorflow
- WARNING:absl:At this time, the v2.11+ optimizer
tf.keras.optimizers.RMSpropruns slowly on M1/M2 Macs, please use the legacy Keras optimizer instead, located attf.keras.optimizers.legacy.RMSprop.